TinyRenderer笔记3:移动摄像机
3D空间中的基底变化
在欧几里得空间中,一个坐标可以由一个原点和基底给出,考虑点$P$在坐标系$(O,i,j,k)$中拥有坐标$(x,y,z)$的含义,它意味着向量$\overrightarrow{OP}$ 可以表示为:
现在我们有另外一个坐标系$(O,i’,j’,k’)$,如何将坐标从一个坐标系转换到另一个坐标系,首先$(i,j,k)$和$(i’,j’,k’)$是三维的基底,存在一个(非简并)矩阵$M$使得:
参考下面的例子

让我们重新表示$\overrightarrow{OP}$:
现在把右边的$(i’,j’,k’)$替换成矩阵
它给出了坐标从一个坐标系到另一个坐标系的变换公式
look_at
目前我们实现的渲染器相当于使用位于Z轴上的摄像机来绘制场景。如果我们想要移动摄像机得到不同视角的画面,没问题,我们可以移动所有的场景,而不移动摄像机。
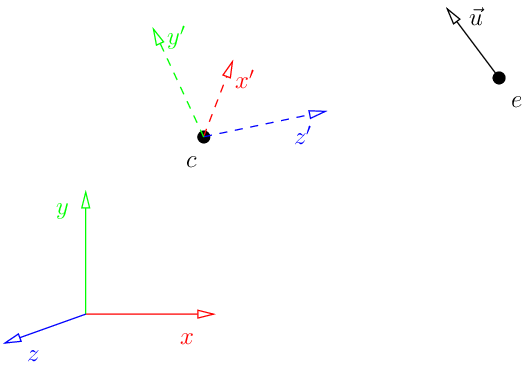
让我们这样来看待这个问题:我们想画一个场景,相机位于点$e$(眼睛)。相机应对准点$c$(中心),向量$u$(up)指向画面的上方:
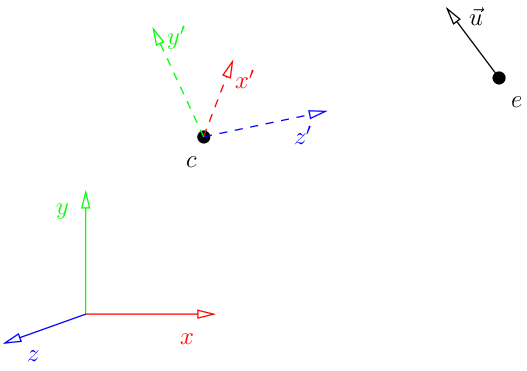
这意味着我们要在坐标系$(c,x’,y’,z’)$中渲染,但是我们的模型是在$(O,x,y,z)$中给出的,这没有问题,我们只需要计算坐标的变换。这是rust代码将世界坐标转换为摄像机坐标的4x4矩阵ModelView:
// eye 摄像机位置 center 焦点 up视角上方
pub fn lookat(eye: glm::Vec3, center: glm::Vec3, up: Vec3) -> glm::Matrix4<f32> {
let z = glm::normalize(eye - center); // 向量ce
let x = glm::normalize(glm::cross(up, z)); // 同时垂直于 up和z的向量
let y = glm::normalize(glm::cross(z, x));
// 注意glm中是按列存的
#[rustfmt::skip]
let minv = glm::mat4(
x.x, y.x, z.x, 0.,
x.y, y.y, z.y, 0.,
x.z, y.z, z.z, 0.,
0., 0., 0., 1.,
);
#[rustfmt::skip]
// 这里平移为什么是用的center? 因为把摄像机移动回去这个动作,我们并没有定义原来的摄像机位置,所以不知道位移的向量
// 但是原来的焦点可以认为是原点(0,0,0),摄像机的位移和焦点位移是一样的,所以用center的坐标来计算
// 这里如果用eye,就相当于假设原来摄像机在原点,结果也对就是看着比预想中远
let tr = glm::mat4(
1., 0., 0., 0.,
0., 1., 0., 0.,
0., 0., 1., 0.,
-center.x, -center.y, -center.z, 1.,
);
minv * tr
}想象原点$O$平移到$c$ ,然后通过旋转$O$的坐标轴,使得坐标轴$xyz$于$x’y’z’$重合。“我们可以移动所有的场景,而不移动摄像机。”
正常理解是摄像机旋转,然后平移:(旋转、平移可以操作可以叠加成一个矩阵,写成乘法是从后往前写)
我们用它来看物体,可以摄像机不动,对物体做上面变换的逆变换:
旋转矩阵的逆是它的转置,平移矩阵的逆也就是再吧它移回去。
rust代码中写的矩阵是这么来的:
- R - 右向量,对应相机坐标系x轴在世界坐标中的表示
- U - 上向量,对应相机坐标系y轴在世界坐标中的表示
- D - 方向向量,对应相机坐标系z轴在世界坐标中的表示
- P - 相机在世界坐标系中的位置,也是平移的向量
viewport
我们在代码中写过这样的转换
let screen_coords_a = glm::vec3(
((a.x + 1.) * (width) as f32),
((a.y + 1.) * (height) as f32),
a.z,
);我们有一个点$a$,它属于正方形$[-1,1]*[-1,1]$,我们想要把它画成$(width,height)$尺寸的图像。
$a.x + 1$的范围在0到2,$(a.x+1)/2$的范围在0到1,$(a.x+1)*width/2$刚好适配图像尺寸。
接下来要替换掉这种丑陋的方式,把所有的计算写成矩阵形式。
Viewport矩阵:
它意味着立方体$[-1,1] * [-1,1] * [-1,1]$映射到屏幕立方体$[x,x+w] * [y,y+h] * [0,d]$其中d是深度对应z轴。作者说:是的,立方体,而不是矩形,这是因为Z-Buffer的深度计算。这是Z-Buffer的分辨率。我喜欢将其等于255,因为简单地将Z-Buffer的黑白图像进行调试。,暂时还不知道这句话含义。
上面的矩阵也很好推倒,他可以拆分为:
- 平移:把 $[-1,1] * [-1,1] * [-1,1]$ 平移到 $[0,2] * [0,2] * [0,2]$
- 缩放: $[0,2] * [0,2] * [0,2]$ 缩放到 $[0,1] * [0,1] * [0,1]$
- 缩放: $[0,1] * [0,1] * [0,1]$ 缩放到 $[0,w] * [0,h] * [0,d]$
- 平移: $[0,w] * [0,h] * [0,d]$ 平移到 $[x,x+w] * [y,y+h] * [0,d]$
最终结果就是viewport矩阵
fn viewport(x: i32, y: i32, w: i32, h: i32) -> glm::Matrix4<f32> {
let (x, y, w, h) = (x as f32, y as f32, w as f32, h as f32);
let d = 255.;
#[rustfmt::skip]
let m = glm::mat4(
w/2., 0., 0., 0.,
0., h/2., 0., 0.,
0., 0., d/2., 0.,
x+w/2., y+h/2., d/2., 1.,
);
m
}坐标变换链
模型一般在他们的本地坐标系中被创建(object coordinates),他们被插入世界坐标(world coordinates)表达的场景,从一个位置转换到另一个是用矩阵Model进行的。然后,我们想在相机坐标系(eye coordinates)中表达它,这个转换叫做View。然后使用投影矩阵(Projection)对场景进行透视变形,这个矩阵将场景转换为所谓的裁剪坐标(clip coordinates)。最后,我们绘制场景,将裁剪坐标转换为屏幕坐标的矩阵称为Viewport。
如果我们从.obj文件中读取点v,那么为了在屏幕上绘制它,它将经历以下转换链:
Viewport * Projection * View * Model * v.当我们只画一个对象时,Model不做用任何事情(我们不需要更改对象在世界中的位置),可以忽略。
let fin =view_port * projection * model_view;
let a = v4p2v3(fin * a.extend(1.));
let b = v4p2v3(fin * b.extend(1.));
let c = v4p2v3(fin * c.extend(1.));暂时画出来长这样:
代码见这里e6f0a9d3fbda02776d1ca26af742e1d8f5570f5c
法向量的变换
如果我们有一个模型,并且其法向量由艺术家给出,如果我们使用该模型进行了仿射变换,那么不能简单的对其原有法向量进行相同的变换。
简单的例子就是如$p(1,0)$是模型的某个法向量,我们把模型沿y轴平移1个单位,如果也对法向量进行平移操作得到$p’(1,1)$,显然$p’$和$p$不是平行的.
具体可以看这里:知乎
结论:法向量的变换矩阵为模型变换矩阵的逆转置矩阵